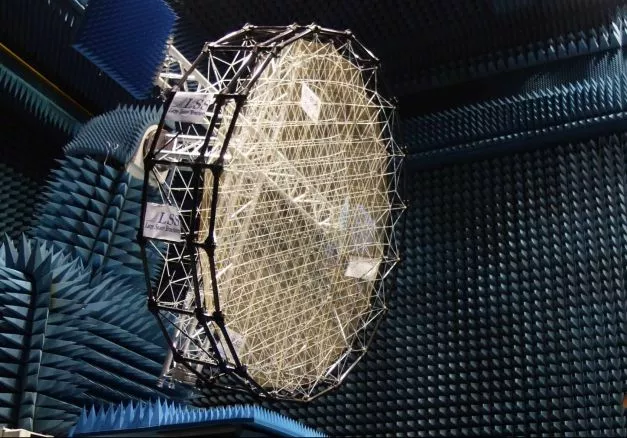
Робота-прыгуна испытали в микрогравитации Это трехногий прототип SpaceHopper
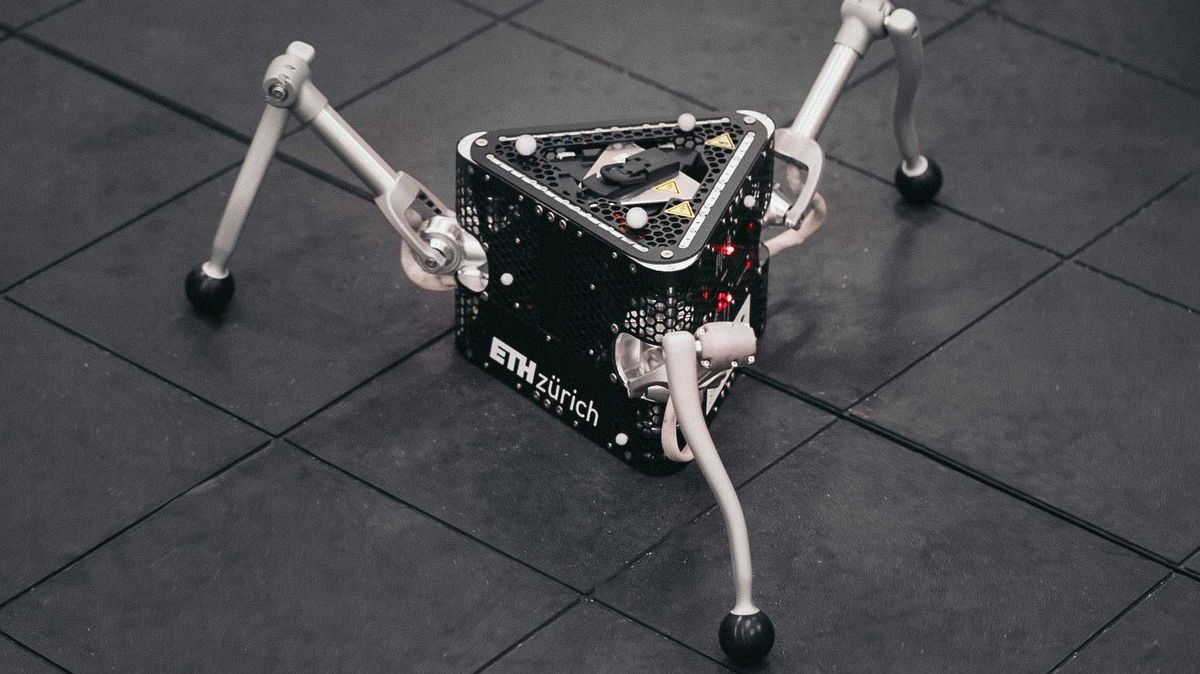

Инженеры из Швейцарской высшей технической школы Цюриха успешно провели испытания прототипа робота-прыгуна SpaceHopper в условиях микрогравитации. Прототип предназначен для работы на поверхности астероидов, комет и других небольших небесных тел с низкой гравитацией.
Робот весит пять килограмм и состоит из алюминиевого корпуса в форме треугольной призмы с тремя управляемыми ногами. Каждая нога оборудована электроприводами, обеспечивающими три степени свободы: два мотора вращают тазобедренный сустав, а один отвечает за сгибание ноги в колене. Робот передвигается с помощью прыжков, во время которых использует ноги для ориентации корпуса в пространстве.
Система управления роботом основана на алгоритмах машинного обучения, которые контролируют движения всех девяти моторов. Эти моторы создают необходимый толчок для прыжка, а во время полета манипуляции с ногами помогают изменять положение робота, позволяя ему корректно приземлиться. Также система предусматривает сгибание ног при касании с поверхностью, чтобы поглотить удар и стабилизировать робота после приземления.
Испытания в условиях микрогравитации были проведены на борту самолета во время параболического полета, что позволило создать невесомость и проверить работу робота в условиях, приближенных к космическим. В ходе тестирования SpaceHopper успешно выполнил заданные маневры, подтвердив свою способность к передвижению и ориентации в условиях низкой гравитации.
Какие бывают роботы:
Использованные источники: